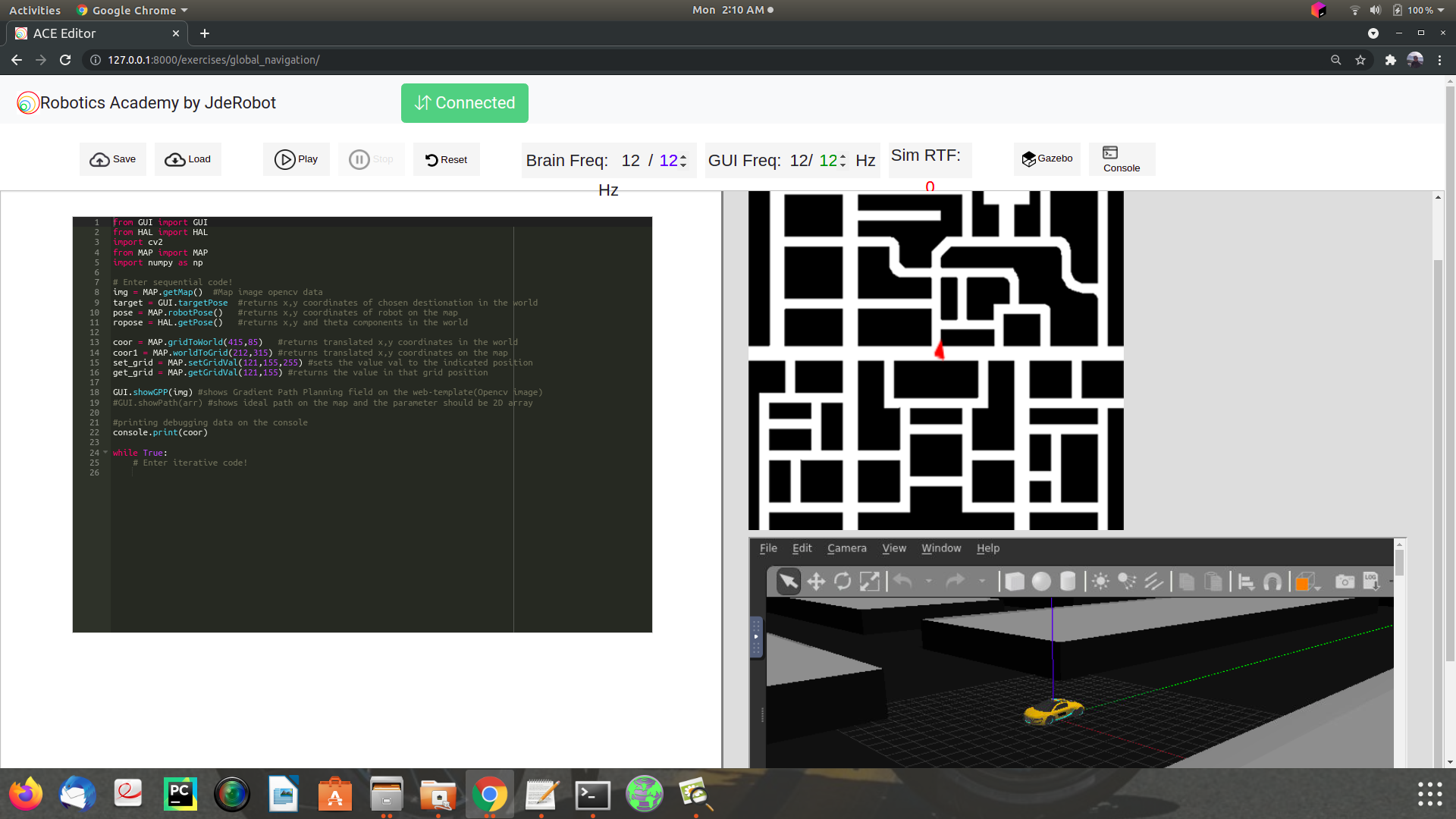
A web based template for Global Navigation simulation for robotics enthusiasts
Multi Author Support allows to create articles with different Authors